
Inleiding

In het hoofdstuk technieken zijn al verschillende netwerken gepresenteerd en welke leerstrategieën er zijn. Ook hebben we in de vorige paragraaf het kleinste netwerk, de preceptron, in meer detail bekeken en deze via begeleid leren getraind tot een zo klein mogelijke fout in de voorspelling. Je hebt daar gezien dat de gewichten van de enige perceptron in dit netwerk zich ook bewijsbaar laat aanpassen aan de trainingsdata, door in te spelen op de grootte van de fout. De gebruikte trainingsmethode valt onder wat men noemt de gradiënt technieken.
Bij een gradiënt techniek wordt in een toestand bepaald in welke richting de toestand het snelst kan veranderen in de richting van een gewenste toestand. In de wiskunde wordt snelheid in een punt (=toestand) bepaald door de waarde van de afgeleide (=helling = gradiënt) in dat punt. In het trainen van neurale netwerken is de gewenste toestand het punt waar de fout zo klein mogelijk is. In figuur 1 zie je een hypothetisch voorbeeld. Bij een gegeven set trainingsdata zie je een berglandschap met op de z-as de grootte van de fout bij bepaalde waarden van de gewichten (de twee andere assen, dus hier gaat het slechts om twee gewichten). Bij het leren start je ergens in dit landschap en volg je het steilste pad naar een laag punt in het landschap. De zwarte lijntjes zijn voorbeelden van zulke paden in dit landschap. Je ziet dat je niet altijd op de juiste of wel de laagste plek in het landschap terecht komt. Het startpunt en de vorm van het landschap bepaalt waar je uiteindelijk terecht komt. Er wordt dan ook vaak meerdere keren vanuit andere startpunten geleerd. In de meeste neurale netwerken zijn er veel knopen en meerdere lagen, dus ook veel meer gewichten (is meer assen en dus nog meer dimensies) die aangepast moeten worden. Het foutenlandschap kan dan nog ingewikkelder worden.
Als er meerdere verborgen lagen in het netwerk aanwezig zijn, in de meeste gevallen dus, is het idee van trainen hetzelfde als bij het netwerk bestaande uit één perceptron. Het probleem is dat je de fout bij een trainingspunt alleen meet aan het eind van het netwerk. Echter ook in de tussenlaag hebben we een fout nodig om te kunnen corrigeren. De techniek om de uiteindelijke fout door het netwerk te sturen noemt men back propagation. In de onderstaande video wordt dit idee uitgelegd en in een iets bredere context geplaatst.
In deze cursus gaan we niet op de wiskunde van back propagation in, omdat, zoals je in de video kan zien, de onderliggende wiskundige technieken nog niet bij jullie bekend zijn. Voel je je echter uitgedaagd dan zijn er vele plekken met uitleg op het internet te vinden, b.v. Matt Mazur en Mikael Laine.
In dit hoofdstuk ga je onderzoeken wat het effect is van keuzes in vorm van het netwerk en de keuzes in de instellingen van het trainingsproces. Je gebruikt daarvoor een aantal applets die zijn gebouwd op de bibliotheek van brain.js. In deze applets bieden we je een aantal voorbeelden aan, maar kun je zo je wilt ook eigen trainingsdata voor een probleem invoeren. Al deze voorbeelden blijven eenvoudig. Het doel is te ervaren waar je zoal op moet letten als je een netwerk bouwt en gaat trainen.
Simpele logische schakelingen
We beginnen met het trainen van een simpel netwerk dat moet leren om te bepalen of iets waar is of niet waar, gebaseerd op een netwerk met twee inputs die elk waar of niet waar zijn. Om dit een beetje een context te geven gaan we dit voorbeeld ophangen aan de huisdieren kat en hond en kindertal. We laten het netwerk dan een uitspraak doen over jouw keuze.
- De dierenliefhebber
-
x1 ∨ x2 = ... 0 ∨ 0 = 0 0 ∨ 1 = 1 1 ∨ 0 = 1 1 ∨ 1 = 1 huisdier? status kat hond = dierenliefhebber? nee nee = nee nee ja = ja ja nee = ja ja ja = ja Een persoon kan een kat, een hond, beide of geen van beide als huisdier hebben. Heeft de persoon er minstens één, dan vinden we het een dierenliefhebber, anders niet. Zie de tabel links. Dit is een voorbeeld van de logische schakeling of ofwel de of-poort. We kunnen dit voorbeeld omzetten in getallen zodat we het de computer kunnen voeren, nee wordt 0 en ja wordt 1. Het wel of niet hebben van een kat wordt de eerste input (x1) en het wel of niet hebben van een hond wordt de tweede input (x2) van het netwerk. Een abstractere weergave van dit probleem wordt dan de tabel rechts. Deze tabel geeft alle combinaties die mogelijk voor dit probleem en daarmee gaan we ons netwerk trainen. Aan het eind van het trainen moet je dan met de invoer [1,0] de uitvoer 1 krijgen, ofwel in het bezit van een kat ben je een dierenliefhebber.
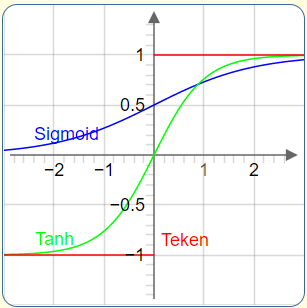
Voor dit probleem een neuraal netwerk gebruiken is echte onzin, want je kunt zonder trainen je vraag opzoeken in de tabel. Dat we het toch doen is om te leren hoe effectief het netwerk kan leren. Open deze applet en ga op onderzoek uit. De activeringsfunctie die in dit voorbeeld wordt gebruikt is de sigmoïde functie $\sigma(x)$, die waarden tussen 0 en 1 kan aannemen, echter niet de waarden 0 en 1 zelf. Hoe groter (of kleiner) $x$ hoe dichter $\sigma(x)$ bij 1 ( of 0)
- Hotel de botel van dieren
-
x1 ∧ x2 = ... 0 ∧ 0 = 0 0 ∧ 1 = 0 1 ∧ 0 = 0 1 ∧ 1 = 1 huisdier? status kat hond = Hotel de botel? nee nee = nee nee ja = nee ja nee = nee ja ja = ja Weer kan een persoon kan een kat, een hond, beide of geen van beide als huisdier hebben. Heeft de persoon er twee, dan is deze persoon hotel de botel ofwel stapelgek op dieren, anders niet. Zie de tabel links. Dit is een voorbeeld van de logische schakeling and ofwel de en-poort. De abstractere weergave van dit probleem wordt nu de tabel rechts. Open weer de deze applet en ga op onderzoek uit.
Opdracht-
Verander de trainingsdata naar de uitvoer van de en-poort gegeven in de tabel rechts:
Wat observeer je als je het netwerk dan traint?
antwoord- Je observeert dat er ook hier een lijn is die net als bij de or-poort de punten netjes verdeeld. De belangrijkste observatie is dat door alleen de trainingsdata te veranderen en niet het programma te wijzigen het netwerk ook andere situaties kan leren. Ofwel de trainingsdata bepaalt het voorspellend vermogen van het netwerk.
-
Verander de trainingsdata naar de uitvoer van de en-poort gegeven in de tabel rechts:
- Verantwoordelijke voortplanting
-
x1 ⊻ x2 = ... 0 ⊻ 0 = 0 0 ⊻ 1 = 1 1 ⊻ 0 = 1 1 ⊻ 1 = 0 kind? status jongen meisje = Verantwoordelijk? nee nee = nee nee ja = ja ja nee = ja ja ja = nee Op dit moment zijn er meer dan 7 miljard mensen op aarde, deze hebben niet allemaal dezelfde welvaart. Als iedereen dezelfde welvaart als de gemiddelde Nederlander zou hebben dan is, volgens sommigen, de draagkracht van de aarde 1,5 tot 2 miljard mensen. Om terug te gaan naar deze bevolkingsomvang zouden gezinnen een tijd precies hooguit één nakomeling moeten krijgen. Echter een mens wil zijn genen ook graag doorgeven naar een volgende generatie. Dus één kind per stel is dan nodig. Laten we ervan uitgaan dat we in de toekomst het geslacht van kind, een jongen of een meisje, zouden kunnen kiezen en dat we er van ieder geslacht maximaal één kunnen krijgen dan ben je als stel verantwoordelijk als je één kind krijgt. Deze situatie is in de tabel links weergegeven en in de tabel rechts omgezet naar een getalswaarde. Deze situatie noemt men de exlusieve-of poort (xor (⊻)).
Opdrachten-
Verander de trainingsdata naar de uitvoer van de exclusieve of-poort
gegeven in de tabel rechts.
Je kunt dit netwerk niet trainen met de zelfde instellingen als
bij de en-poort en de of-poort. Waarom niet? Wat moet er veranderen?
antwoord- Je ziet dat het niet mogelijk is om de puntenwolk met slechts één lijn te scheiden. Met één enkele perceptron kan er slechts één lijn worden gemaakt. We hebben meerdere lagen nodig om dit probleem te trainen. Laad in de applet het xor voorbeeld door op de knop xor te drukken en beantwoordt de volgende vragen.
-
Het kan zijn dat bij het indrukken van de xor knop in het menu, de training al direct mislukt. Er is bewust een situatie gecreëerd die vaak een slecht trainingsresultaat geeft. In het Excel document in het tabblad “Logische schakeling xor” vul je onder opdracht 6 de tabel in door per situatie 50 keer op de Train knop te drukken en dan het aantal trainingen en het aantal mislukkingen te tellen.
Beantwoord daarna de volgende vragen:leersnelheid aantal trainingen aantal mislukkingen 0.9 0.7 0.5 0.3 (verhoog max aantal iteraties naar 100000) 0.1 (verhoog max aantal iteraties naar 100000)
- Is het aantal mislukkingen bij iedere leersnelheid gelijk?
antwoord- Iedere keer dat je op de train knop drukt worden de gewichten $w_0$, $w_1$ en $w_2$ bij toeval gekozen. Sommige combinaties blijken tot een niet succesvolle training te leiden. De kans dat het misgaat blijkt in onze simulaties groter te zijn als de leersnelheid hoger is. Echter bij een leersnelheid van 0.1 vonden wij ook nog een flink aantal mislukkingen. Onze reeks van 50 trainingen leverde (0.9:13, 0.7:8, 0.5:9, 0.3:4, 0.1:5)
- Waarom moet je het maximaal aantal iteraties verhogen
bij lagere leersnelheden?
antwoord- Lagere leersnelheden zorgen voor kleinere stapjes in de ruimte van mogelijke waarden voor de gewichten. Als een bepaalde set van gewichten moet worden bereikt dan doet een mier daar langer over dan een luipaard. Maar zoals we hierboven hebben ontdekt kan een luipaard zijn doel voorbij schieten.
- Wat valt je op in het diagram bij een mislukte training?
antwoord- Er is minstens één van de twee lijnen die niet op de juiste manier punten verdeeld.
- Is het aantal mislukkingen bij iedere leersnelheid gelijk?
-
In vorige opdracht zag je dat het leren zelfs bij kleine leersnelheden niet altijd tot een succesvolle training leidde. We gaan nu onderzoeken of meer knopen in een laag daar verbetering in kan brengen. Zet de leersnelheid op 0.9. Herhaal weer de procedure als boven, maar noteer ook hoe veel lijnen in het diagram de punten onjuist verdelen, ofwel een rode en blauwe regio juist scheiden.
lagen aantal trainingen aantal mislukkingen aantal keer dat een lijn verkeerd ligt [3] [4] - Is er altijd een succesvolle training?
antwoord- In onze poging met met 3 knopen [3] trad er slechts één mislukking op in de 50 trainingen. In dit geval waren er 2 lijnen die de puntenwolk niet juist verdeelden. In 20 van de trainingen deelden alle 3 de lijnen de punten wolk op een juiste manier. Bij 4 knopen trad er in 200 keer trainen geen enkele mislukking op en deelden er in slechts 5 gevallen alle lijnen de punten op een juiste manier in twee groepen.
- Wat zou een verklaring kunnen zijn voor het succes van meerdere
knopen in de verborgen laag?
antwoord-
Het lijkt er op dat er minimaal twee lijnen juist moeten liggen. Met meer knopen is de kans daarop groter. Het netwerk kan een slechte set start gewichten bij één knoop blijkbaar compenseren met de andere knopen.
Voor degenen die iets van kansrekening weten zou een benadering met de binomiale verdeling misschien inzicht kunnen geven:
Bij 2 knopen en threshold 0.9 vonden wij 2 juiste lijnen in 37 pogingen bij 50 herhalingen ofwel P=37/50=0.74.
Omdat P( precies 2 keer een succes,n=2) = p2 is de kans p op eén juiste lijn = $\sqrt{0.74}=0.86 $.
Zetten we deze kans door naar meer lagen dan levert de binomiale verdeling:
Bij 3 knopen P(minstens 2 successen, n=3,p=0.86)=0.95.
Bij 4 knopen p(minstens 2 successen, n=4,p=0.86)=0.99.
In 50 herhalingen verwacht je dan $50 \cdot 0.95 = 47.550⋅0.95=47.5$ successen bij 3 knopen en
$50 \cdot 0.99 = 49.5 50⋅0.99=49.5$ successen bij 4 knopen.
-
Het lijkt er op dat er minimaal twee lijnen juist moeten liggen. Met meer knopen is de kans daarop groter. Het netwerk kan een slechte set start gewichten bij één knoop blijkbaar compenseren met de andere knopen.
- Hoeveel iteraties zijn er nodig bij een succesvolle training bij 2 , 3 en 4 knopen bij een leersnelheid van 0.9?
antwoord-
Wij observeerden in bij 3 en 4 knopen gevallen rond de 1000 iteraties.
Bij 2 knopen waren er vaak uitschieters naar veel meer dan 1000 iteraties nodig.
-
Wij observeerden in bij 3 en 4 knopen gevallen rond de 1000 iteraties.
- Welke strategie lijkt meer succes te leveren, meer knopen per laag of een lagere leersnelheid?
antwoord- Meer knopen in een tussenlaag levert met een hogere leersnelheid vaker tot een succesvolle training met minder iteraties.
- Is er altijd een succesvolle training?
-
Verander de trainingsdata naar de uitvoer van de exclusieve of-poort
gegeven in de tabel rechts.
Je kunt dit netwerk niet trainen met de zelfde instellingen als
bij de en-poort en de of-poort. Waarom niet? Wat moet er veranderen?

Bias
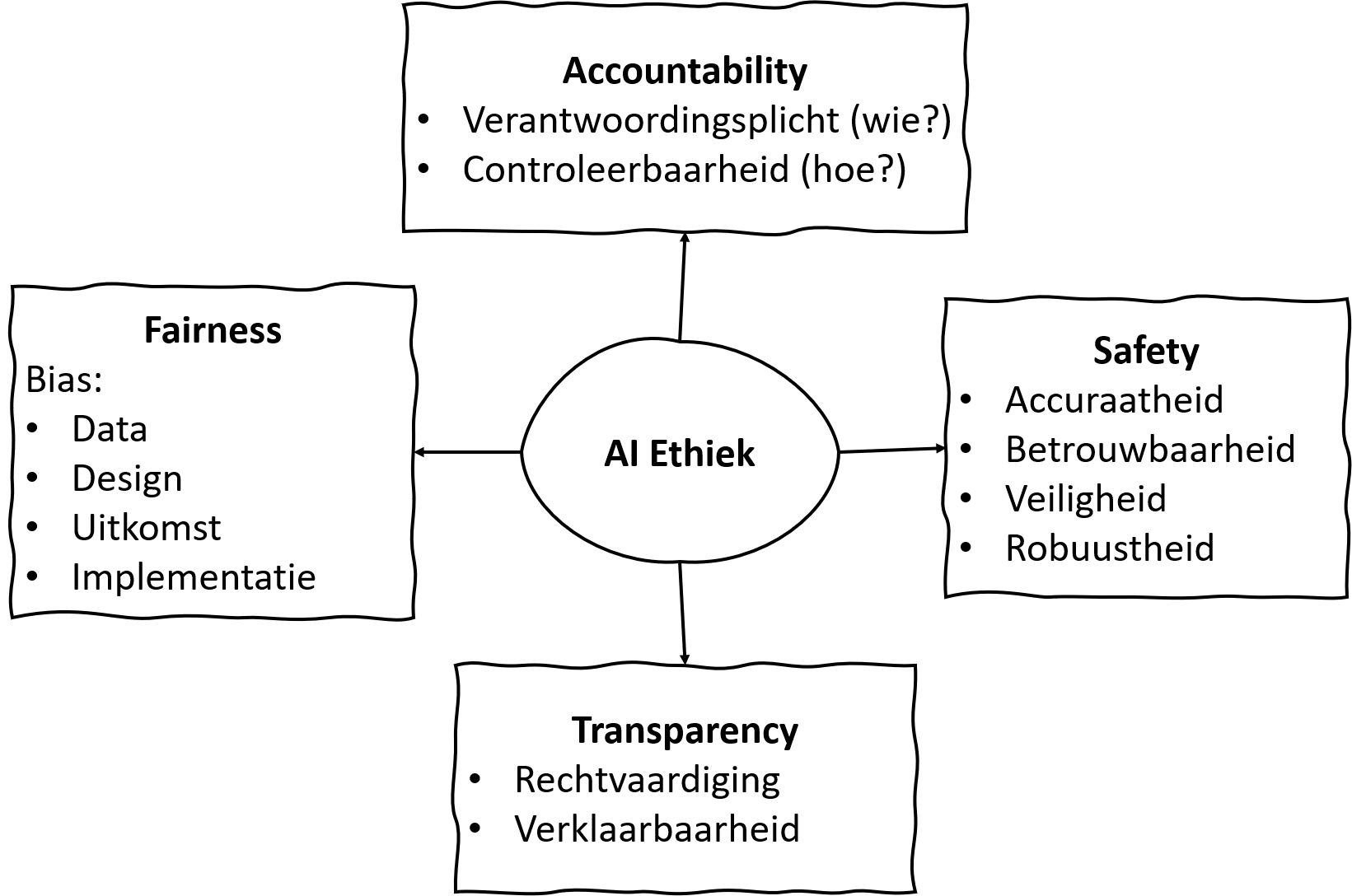
Bij het maken van een applicatie die gebruikt maakt van neurale netwerken, of AI in het algemeen, is het van groot belang aandacht te besteden aan de mogelijke problemen die deze applicatie met zich draagt. In deze cursus hebben we daarom de sectie ethiek een grote plek toebedeeld. De FAST-principes ( fairness, accountability, safety en transparency ) worden daarin uitgelegd. In dit hoofdstuk zijn we neurale netwerken aan het trainen. De opdrachten zijn er om te ontdekken hoe een netwerk te trainen is door verschillende keuzes te maken. In figuur 5 zie je onder Fairness de term bias staan en onder Transparency de termen Rechtvaardiging en Verklaarbaarheid. We beginnen met rechtvaardiging en verklaarbaarheid van een AI applicatie, gebaseerd op neurale netwerken. Om aan deze principes te kunnen voldoen moet er onder andere de volgende punten in de documentatie aanwezig zijn:
- de keuze in het ontwerp (design) van het netwerk
- de keuze in de implementatie van het netwerk
- de eigenschappen van de trainingsdata gebruikt om het netwerk te trainen
- een onderbouwing waarom de uitkomst bij de trainingsdata op waarheid berust
De Engelse term bias is een homoniem, ofwel één woord met meerdere betekenissen. Het lastige is dat deze verschillende betekenissen op verschillende plaatsen in het ontwikkeltraject van een AI applicatie effect hebben op de fairness van die applicatie. De voor AI belangrijke betekenissen zijn:
- bias = vooringenomenheid
- bias = vooroordeel
- bias = neiging
- bias = effect
Al deze betekenissen hebben effect op het design, trainingsdata en training van het netwerk. De eerste twee betekenissen zijn eigenlijk gelijk en zijn van belang in het voortraject van het bouwen van een applicatie. De derde en de vierde betekenis zijn van belang in de beschouwing van de kwaliteit van de trainingsdata.
-
Is er sprake van bias in de "applicaties" die we hebben gemaakt
voor de logische schakelingen?
antwoord-
Wel degelijk! Één van de auteurs wilde heel graag wat
voorbeelden bij elk van de logische schakelingen. De voorbeelden
staan stijf van de vooroordelen:
- In al deze voorbeelden hebben we slechts twee inputs toegestaan: geen andere huisdieren, geen mogelijkheid voor twee jongens, twee meisjes of gender neutrale personen.
- De beperking in het aantal mogelijke inputs zorgt er voor dat je de applicatie geen voorspelling kan laten doen over situaties die niet in de trainingsdata voorkomen. Dit is een vooroordeel over de mogelijke situaties die we toestaan en die doorwerkt in de bruikbaarheid van een applicatie. Mee te nemen in het traject Rechtvaardiging en verklaarbaarheid
- Voor de combinaties van input hebben we een uitspraak
gedaan over de uitkomst: Wel of niet een dierenliefhebber,
wel of niet stapelgek op dieren, wel of niet een verantwoordelijke wereldburger. Deze uitkomst hebben
de makers van de applicatie opgelegd als uitkomst van
de applicatie en kan een vooringenomenheid zijn.
Als er niet eerst gedegen onderzoek wordt gedaan naar de waarheid van deze uitkomsten bij de gegeven input dan kan een AI applicatie de reinste onzin produceren. Oorzaak-gevolg relaties worden heel vaak fout gelegd en het is dus zaak te documenteren waar de gebruikte oorzaak-gevolg relatie vandaan komt.
-
Wel degelijk! Één van de auteurs wilde heel graag wat
voorbeelden bij elk van de logische schakelingen. De voorbeelden
staan stijf van de vooroordelen:
In de opdracht hierboven heb je geleerd dat de aannames die je maakt van groot belang zijn voor de AI applicatie die je maakt. De voorbeelden bij de logische schakelingen zijn heel erg vooringenomen. Er is echter een absolute noodzaak tot vooringenomenheid voor AI applicaties. Een AI applicatie moet voorspellingen kunnen doen, ook in situaties die de applicatie niet eerder heeft gezien. De trainingsdata vormen een landschap. De AI applicatie leert dit landschap op basis van de trainingsdata. Als de applicatie vervolgens een uitspraak moet doen voor een datapunt dat niet gelijk is aan één van de trainingspunten dan gaat de ontwikkelaar van de applicatie er van uit dat dit datapunt en de geleverde voorspelling netjes in dit landschap past.
Op de twee andere betekenissen van bias neiging en effect gaan we dieper in nadat jullie eerst weer wat onderzoek hebben gedaan aan netwerken die moeten leren gebieden te herkennen.
Veel gegevens toch simpel: lijnen
lijn $y=2x-1$ ofwel $x - \frac{1}{2}y= \frac{1}{2}$
In de paragraaf Hoe leert een neuraal netwerk hebben we het leren van een perceptron uitgelegd met behulp van punten die boven (uitvoer = 1) dan wel onder (uitvoer = -1) de lijn $y=2x-1$ liggen. Deze lijn zou bijvoorbeeld een scheidslijn kunnen zijn van twee ondergrondse aardlagen. Om deze grens te bepalen boort men willekeurig gaten in de grond en bepaalt men per gat het type van de aardlaag.
In dit voorbeeld en de andere voorbeelden met lijnen bekijken we de invloed van de datapunten op de training van netwerk. De activeringsfunctie die in dit voorbeeld wordt gebruikt is de tangenshyperbolicus functie $tanh(x)$, die waarden tussen -1 en 1 kan aannemen, echter niet de waarden -1 en 1 zelf. Hoe groter (of kleiner) $x$ hoe dichter $\tanh(x)$ bij 1 ( of -1)
In deze opdrachten maken we weer gebruik van de applet maar nu kies je de optie lijn.
Het simpele perceptron netwerk maakt het mogelijk een lijn die de punten scheidt te vinden. Deze lijn valt, afhankelijk van de set trainingspunten, meer of minder samen met de lijn $y=2x-1$. In de vorige paragraaf gebruikten we de teken functie als activeringsfunctie in het trainingsproces. Brain.js heeft deze activeringsfunctie niet. De tangens hyperbolicus functie die ook in de vorige paragraaf is gepresenteerd gebruiken we als alternatief. De tangens hyperbolicus kan ook in netwerken met meer lagen worden gebruikt, waar een 1 of -1 situatie als uitvoer nodig is.
De app in deze pagina kan ook hoger dimensionale netwerken aan (= knopen met meer dan twee elementen in de input lijst). De lijn $y=2x-1$ wordt in deze app weergegeven met $x=x_{1}$ en $y=x_{2}$ als $x_{1} -\frac{1}{2}x_{2}=\frac{1}{2}$
-
In dit voorbeeld hebben we bewust de
fout grens heel tolerant neer gezet en
de leersnelheid hoog.
Niet altijd, maar vaak, zal na de training
van het netwerk een aantal punten
aan de verkeerde kant van de door
het netwerk berekende lijn liggen.
Druk net zo lang op de
knop tot er fout voorspelde trainingspunten
zijn. In de voorspellingen lijst zijn hebben
die punten een rode achtergrond.
Heb je zo'n situatie gevonden druk dan een aantal malen op de Train knop en bekijk de ligging van de door het netwerk berekende lijn. Is de ligging van de lijn altijd gelijk?
antwoord- Door de grote foutmarge kan het trainen succesvol stoppen zonder alle punten juist te hebben geclassificeerd. Er zullen vele lijnen zijn die binnen deze foutmarge passend zijn.
-
Wat valt op aan de punten die niet goed voorspeld worden?
antwoord- Deze punten liggen dicht bij de lijn $y=2x-1$.
-
Verander de fouten grens (threshold)
van 0.1 eerst naar 0.01 en dan naar 0.001.
Druk dan in die gevallen weer een aantal malen op de
Train knop.
Wat observeer je in de lijst met voorspellingen en de ligging van de
door het netwerk geleverde lijn?
antwoord- Je zult zien dat bij een kleinere toegestane fout de training lijnen oplevert die beter passen en er minder punten fout worden geclassificeerd. De training duurt wel langer.
-
Zet de grens van de fout weer op 0.1. Verlaag nu de leersnelheid naar
0.1. Onderzoek of dit tot een vergelijkbaar resultaat leidt.
antwoord- In dit voorbeeld heeft het verlagen van de leersnelheid veel minder effect dan het verlagen van de error threshold.
Lijn $y=2x-1$ ofwel $x_{1} -\frac{1}{2}x_{2}=\frac{1}{2}$ met fouten in de trainingsdata
In de situatie hierboven hebben we de invoer zo gemaakt dat de trainingsdata precies vertelde aan welke kant van de werkelijke lijn het punt lag, ofwel we hadden perfecte meetpunten. Nu introduceren we een fout in de metingen. Gebruiken we het voorbeeld van de aardlagen dan kan bij een meetpunt de foute aardlaag worden opgehaald. We nemen aan dat hoe dichter bij de scheidingslijn bent hoe groter de kans is dat een punt een foute uitkomst krijgt. In de simulaties wordt eerst bij toeval een punt gekozen. Dan wordt een toevalsgetal tussen 0 en 1 getrokken. Op basis van dit toevalsgetal en de afstand tot de lijn wordt bepaald of het punt een foute uitvoer krijgt.
Het netwerk weet niet dat die fouten er zijn (weet ook niets van kleurtjes) en gaat proberen de lijn te schatten. Dat lukt niet altijd zoals je in het volgende onderzoekje misschien ziet (Het is en blijft tenslotte een kans proces).
-
Het netwerk onder knop heeft standaard een threshold van 0.1
en een leersnelheid van 0.3. Je hebt bij de lijn situatie al
gevonden dat de threshold de belangrijkste instelling is om
de lijn zo dicht mogelijk te benaderen.
Druk nu meerdere malen op de knop. Hoe groot is dan de fout na het stoppen van de training bij de pogingen dat het netwerk niet succesvol eindigt?
antwoord- Die ligt natuurlijk boven de 0.1, maar is vaak behoorlijk veel groter.
-
Als een training wel lukt, wordt een foutief punt dan ook altijd
als een foutief punt gezien (donkerrood) of kan dat punt
ook een voorspelling hebben gelijk aan de foute uitvoer waarde (zwarte achtergrond)
antwoord- Heel vaak krijgt een foute uitvoer een vergelijkbare voorspelling. Het netwerk geeft dan eigenlijk een fout antwoord. Maar ja dat weet dat netwerk niet. Het netwerk vindt de voorspelling juist in orde.
- Zijn er altijd veel fouten nodig om het trainen te laten
mislukken?
antwoord- Soms gaat het al met 1 fout mis, maar met meer foute meetpunten wordt de fout waarbij gestopt wordt groter.
- Lukt het om in een situatie waar het trainen misgaat het probleem
op te lossen door meer verborgen lagen in te voeren?
antwoord- Het lukt vaak om met een extra verborgen laag [3] een training op een nette manier af te sluiten, meestal wordt de fout bij een mislukte training wel kleiner
- Als het lukt om met meer lagen een succesvolle
training te krijgen, hoe zit het dan
met de voorspelling van de foute punten?
Tip: Denk aan het xor voorbeeld.
antwoord- Het kan zo maar zijn dat alle voorspellingen van het netwerk in overeenstemming zijn met de foute invoer (alleen zwarte regels bij de voorspellingen). Waarom is dit te vergelijken met het xor voorbeeld? Bij het xor voorbeeld zijn er minimaal twee lijnen nodig om de gebieden te scheiden. Door de fouten in de trainingsdata onstaan er gebiedjes die door de inzet van meer lijnen afgebakend kunnen worden. Overdimensionering van een netwerk kan dus leiden tot een AI applicatie die alle foutieve voorbeelden goed voorspeld.
- Druk weer op de knop en tel in de trainingsdata het aantal
fouten. (b.v. 4) Zet lagen op [fouten +2]
(b.v. [6]) leersnelheid op 0.1 en threshold op 0.01.
Is dit netwerk altijd te trainen?
antwoord- Heel vaak lukt het om dit netwerk te trainen. Doordat er meerdere lijnen worden gevormd kunnen er eilandjes komen waar de fout gemeten punten in komen te liggen. Het netwerk zal dan deze fouten niet corrigeren maar juist accepteren. Klakkeloos een groot netwerk maken om het netwerk goed door een training te laten komen is geen juiste strategie om tot een betrouwbare AI applicatie te komen.
- Wat leren we van dit onderzoekje?
antwoord- De kwaliteit van de trainingsdata heeft invloed op het leerproces. Er is een hoge threshold waarde nodig om een netwerk een training netjes af te sluiten. Ook kunnen er meerdere lagen worden ingezet. Het gevolg van beide strategieën is dat het netwerk ver van de echte oplossing kan zijn, waardoor de voorspellende waarde aanzienlijk afneemt en zelfs foutief kan zijn. Best logisch eigenlijk, maar wel een groot punt van aandacht als je een AI applicatie, getraind met kwalitatief slechte trainingsdata, aan gebruikers aanbiedt. De kwaliteit van de trainingsdata heeft invloed op het leerproces. Er is een hoge threshold waarde nodig om een netwerk een training netjes af te sluiten. Ook kunnen er meerdere lagen worden ingezet. Het gevolg van beide strategieën is dat het netwerk ver van de echte oplossing kan zijn, waardoor de voorspellende waarde aanzienlijk afneemt en zelfs foutief kan zijn. Best logisch eigenlijk, maar wel een groot punt van aandacht als je een AI applicatie, getraind met kwalitatief slechte trainingsdata, aan gebruikers aanbiedt.
Bias vervolgd
We hadden beloofd terug te komen op de andere twee betekenissen van bias neiging en effect. In de onderzoekjes naar de kwaliteit van de trainingsdata heb je ervaren dat een lagere threshold waarde, de drempelwaarde van de fout in de training, vaak betere trainingsresultaten levert bij perfecte datapunten, maar dat bij fouten in de trainingsdata een hogere threshold nodig is om een training succesvol af te ronden (onder de voorwaarde dat het netwerk uit dezelfde lagen bestaat). Dit laatste levert dus wel onbetrouwbaarder uitspraken van het netwerk. Als de trainingsdata beter zijn is het effect van de training dus beter en neigt de uitkomst meer naar de waarheid. De bias bepaalt door de trainingsdata wordt dan hoger, in dit geval een positief resultaat. De trainingsdata zijn nu de bepalende factor in de voorspellingen en bepalen nu het vooroordeel. Effect en neiging in het trainingsproces hebben dus als resultaat een vooroordeel door de AI applicatie gegenereerd door de data.
Je hebt ook gezien dat een netwerk uitgebreid kan worden (overdimensionering) op zo'n manier dat foutieve trainingsdata ook tot een trainingsresultaat kunnen leiden dat het algoritme heel goed vindt en dus een hoge bias levert. De verhoogde bias door overdimensionering is een aanpassing aan foute trainingsdata en dus een aanpassing aan een foute aanname. Het vooroordeel heeft in dit geval dus een negatieve lading.
Kortom het is dus van heel groot belang om de kwaliteit van de trainingsdata vooraf te onderzoeken. Op basis van dit onderzoek moet dan het netwerk worden gevormd.
- Welke betekenissen heeft het woord bias?
Antwoord- vooringenomenheid, vooroordeel, neiging, effect
- Welke betekenissen van bias worden beïnvloed door de keuze van het netwerk en hoe?
Antwoord- neiging, effect. Als de trainingsdata perfect zijn dan kan overdimensionering een positief effect hebben op de kwaliteit van de voorspelling. Het antwoord neigt dan meer naar het juiste antwoord. Bij fouten in de trainingsdata leidt overdimensionering ook tot het voorspellen van die fouten. Dit is een negatief effect.
- Hoe kunnen vooringenomenheid en vooroordelen in een een AI applicatie terechtkomen? Geef een voorbeeld.
Antwoord- Garbage in is garbage out! Bij het begeleid leren van een netwerk bestaat de trainingsdata altijd uit vooroordelen. De trainer voorziet het antwoord bij een trainingspunt. Als in de trainingsdata niet alle mogelijke vooroordelen aanwezig zijn, kunnen deze vooroordelen ook niet in het antwoord van de AI applicatie voorkomen. B.v. Als de trainingsdata alleen datapunten bevat van lachende mensen (gelukkig) en huilende mensen (ongelukkig) dan kan het netwerk niet anders dan één van deze twee mogelijkheden als antwoord geven.
Lijnen vervolgd


In het hoofdstuk Hoe een neural netwerk leert hebben we één grens kunnen bepalen tussen een verzameling punten met behulp van één perceptron. Bij het xor (exclusieve-of) voorbeeld hierboven waren er twee lijnen nodig om deze logische schakeling te leren. In dit deel bekijken we puntenverzamelingen die op basis van twee lijnen zijn ingedeeld. We beschouwen twee situaties. Een situatie waarin we het netwerk willen leren een gebied te vinden waar punten zowel boven lijn 1 en boven lijn 2 ligt (boven 2 lijnen). Een tweede situatie waarin we het netwerk willen leren een gebied te vinden waar punten zowel boven lijn 1 en boven lijn 2 ligt of zowel onder lijn 1 en onder lijn 2 ligt (tussen 2 lijnen). De vraag waaraan we hier aandacht besteden is: Hoe ziet het meest minimale netwerk eruit om elk van de twee situaties op te lossen.

Eigen Quickdraw vervolgd
In het hoofdstuk technieken heb je gespeeld met een eigen Quickdraw applicatie die je verschillende dieren hebt leren herkennen. Hier stellen we de vraag: Hoe moet een minimaal netwerk er uitzien om $2,3,4,\cdots n$ dieren te leren herkennen. In de eigen Quickdraw applicatie is de input een plaatje bestaande uit zwartwit beeldpunten (pixels). Stel er zijn $n$ beeldpunten.

Je hebt nu kennis gemaakt met neurale netwerken, hoe ze leren, dat bias een probleem is en dat ook de samenstelling van netwerken overdacht moet worden. Meer verdieping willen we je hier niet meer bieden. Misschien heeft deze cursus je nu warm gemaakt voor een studie kunstmatige intelligentie. Wil je geen volledige studie gaan volgen maar wil je toch meer kennis dan zijn er ook nog vele gratis cursussen via universiteiten te volgen. Kijk op Coursera voor een uitgebreid aanbod.In de volgende paragraaf laten we je een hele AI applicatie bouwen. Je ziet dan het hele proces van model naar trainen naar agent op een mobiel.